Innovation
The Future of the Automated Driving Technologies
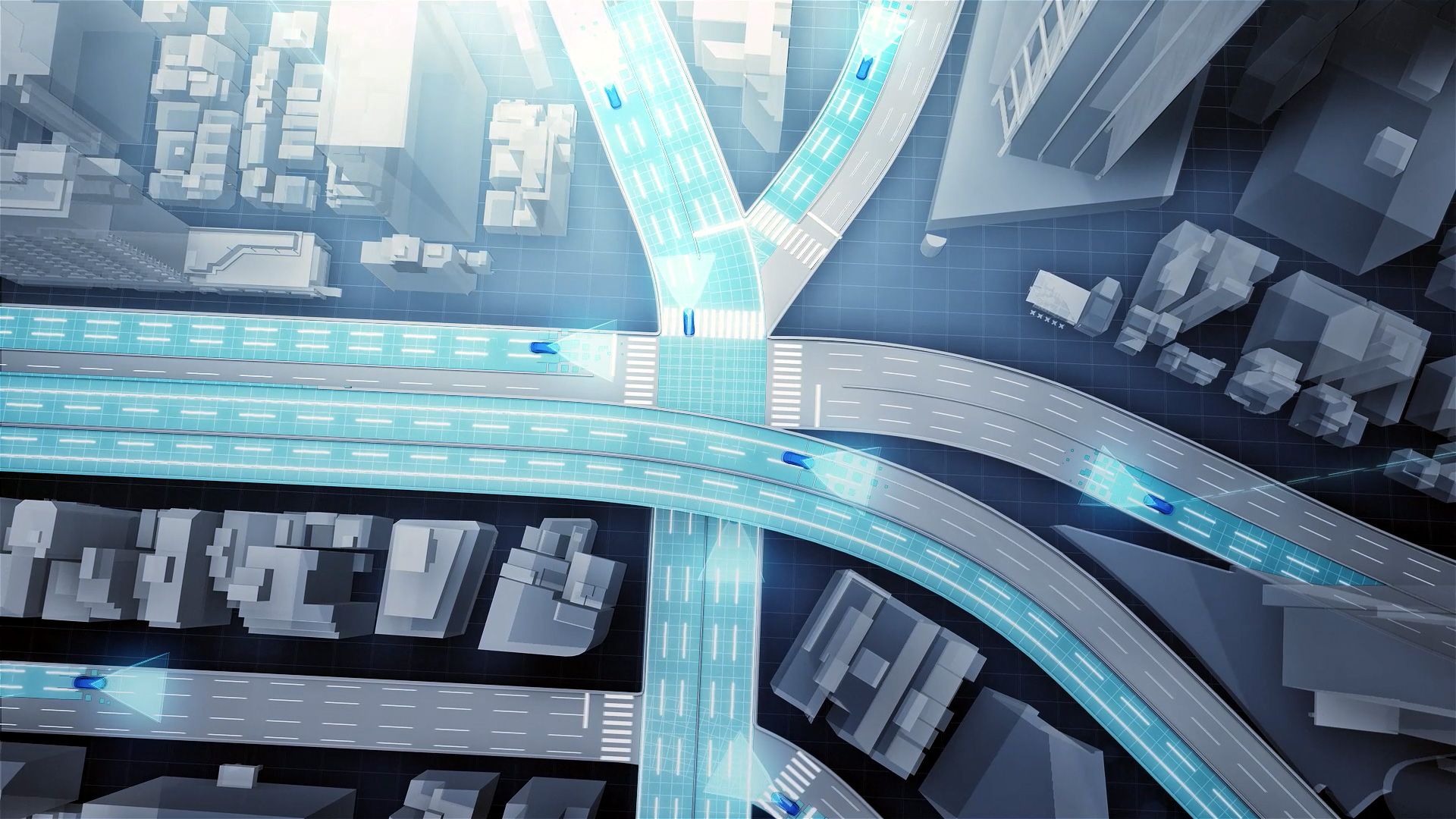
To aid the safe implementation of automated driving, Toyota is developing a high-precision map generation system that will use data from on-board cameras and GPS devices installed in production vehicles. The new system will go on display at CES (Consumer Electronics Show) 2016 in Las Vegas, which will run from January 6 through 9.
Toyota’s new system uses camera-equipped production vehicles to gather road images and vehicle positional information. This information is sent to data centers, where it is automatically pieced together, corrected and updated to generate high precision road maps that cover a wide area.
[embedyt] http://www.youtube.com/watch?v=56RNDP3hD-8[/embedyt]
An understanding of road layouts and traffic rules (including speed limits and various road signs) is essential for the successful implementation of automated driving technologies. Additionally, high precision measurement of positional information requires the collection of information on dividing lines, curbs, and other road characteristics.
Until now, map data for automated driving purposes has been generated using specially-built vehicles equipped with three-dimensional laser scanners. The vehicles are driven through urban areas and on highways, and data is collected and manually edited to incorporate information such as dividing lines and road signs. Due to the infrequent nature of data collection, maps generated in this manner are seldom updated, limiting their usefulness. Additionally, this represents a relatively cost-intensive method of gathering data, due to the need to manually input specific types of data.
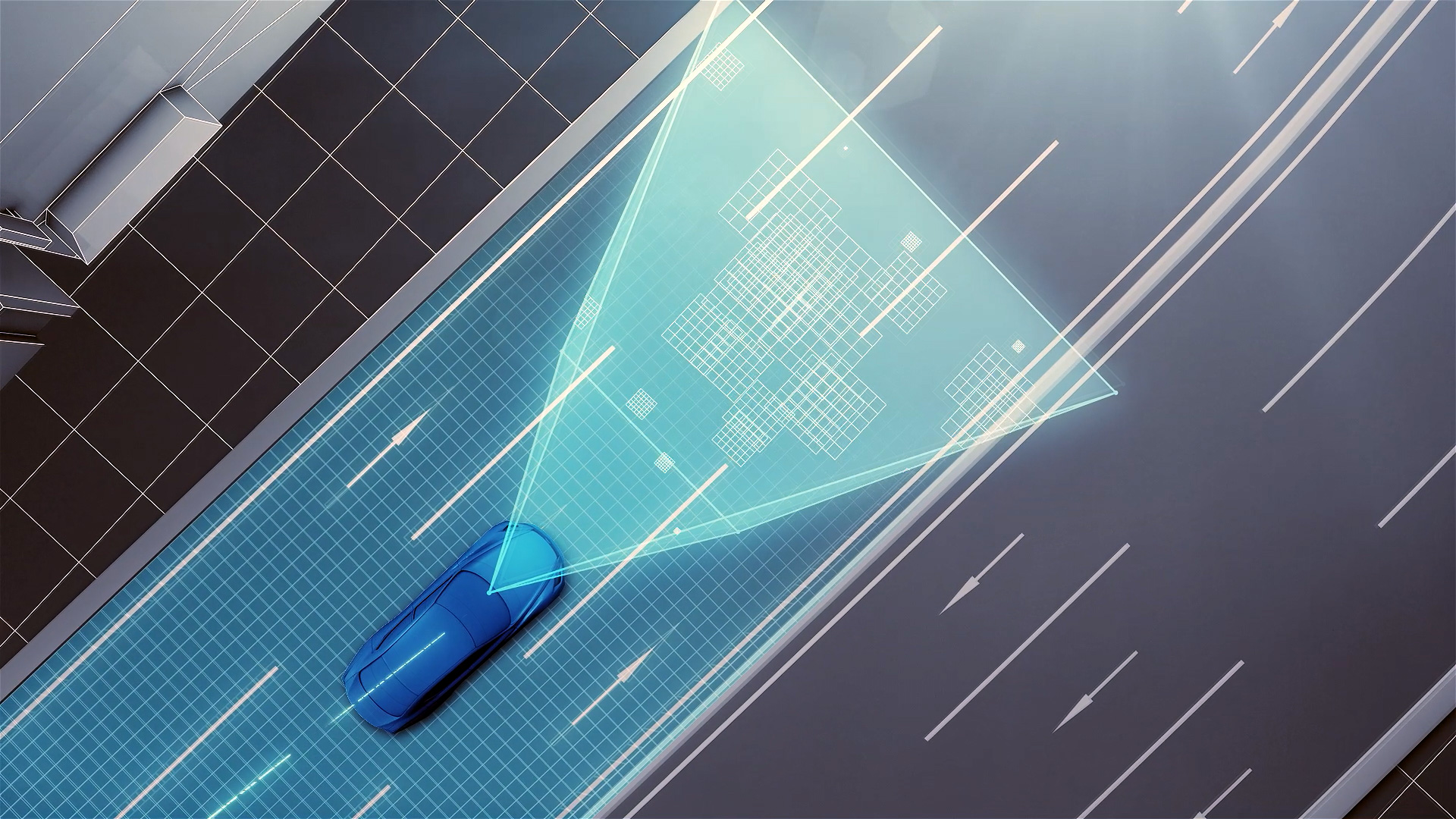
Toyota’s newly developed system uses automated cloud-based spatial information generation technology (developed by Toyota Central R&D Labs., Inc.) to generate high precision road image data from the databanks and GPS devices of designated user vehicles. While a system relying on cameras and GPS in this manner has a higher probability of error than a system using three-dimensional laser scanners, positional errors can be mitigated using image matching technologies that integrate and correct road image data collected from multiple vehicles, as well as high precision trajectory estimation technologies. This restricts the system’s margin error to a maximum of 5 cm on straight roads. By utilizing production vehicles and existing infrastructure to collect information, this data can be updated in real time. Furthermore, the system can be implemented and scaled up at a relatively low cost.

To support the spread of automated driving technologies, Toyota plans to include this system as a core element in automated driving vehicles that will be made available in production vehicles by around 2020. While initial use of the system is expected to be limited to expressways, future development goals include expanding functionality to cover ordinary roads and assist in hazard avoidance. Toyota will also seek to collaborate with mapmakers, with the goal of encouraging the use of high precision map data in services offered by both the public and private sectors.
In October 2015, Toyota introduced the Mobility Teammate Concept, which is part of the company’s approach to embracing automated driving technologies while keeping fun at the center of the driving experience. To that end, the Mobility Teammate Concept envisages a driver-car relationship based on a shared purpose?somewhat like a relationship between close friends who alternately watch over each other and help each other out. Toyota will continue to develop of technologies that aid the spread of automated driving technologies, with the aim of realizing a society where mobility is synonymous with safety, efficiency, and freedom.











Volvo is making a very clear move in the U.S. EV market: charging has to become easier, faster and far less annoying. That is the logic behind the brand’s latest update, which adds Plug & Charge capability and deeper charging integration to its growing electric ecosystem. Instead of forcing drivers to juggle apps, cards and activation steps every time they stop to recharge, Volvo wants the process to feel far more seamless — plug the car in, let it authenticate automatically and get back on the road with as little friction as possible.
That may sound like a small convenience upgrade at first, but it actually addresses one of the biggest real-world pain points in EV ownership. Range gets the headlines, but public charging is often where the experience still breaks down. And for a premium brand like Volvo, that is exactly the kind of problem it needs to solve if it wants its electric SUVs to feel truly complete.

Volvo is expanding Plug & Charge functionality to make public EV charging feel far simpler for U.S. drivers.
Volvo Is Trying To Make EV Charging Feel Less Like A Chore
The real significance of this update is not just the technology itself — it is what Volvo is trying to fix with it.
Public charging still remains one of the most inconsistent parts of the EV experience in America. Even drivers who love their electric vehicles often run into the same headaches: different apps for different networks, awkward payment steps, chargers that need manual activation and route planning that still does not feel as smooth as it should. Volvo’s answer is to remove as much of that friction as possible by making the car do more of the work on its own.
With Plug & Charge, the idea is simple: the vehicle automatically communicates with a compatible charging station, authenticates the session and handles billing in the background. In other words, Volvo wants charging to work more like a premium digital service and less like a scavenger hunt every time you leave home.
This Matters Because Volvo’s EV Lineup Is Growing Up Fast
That change lands at an important moment for the brand.
Volvo is no longer treating EVs as a side project. Models like the EX90 are central to the company’s future in the United States, and the next wave of electric Volvos will need to compete not just on design, safety and range, but on the ownership experience that surrounds them. Charging is a huge part of that.
The challenge for every premium EV brand is that customers do not judge the vehicle only by how it drives. They judge it by how easy it is to live with. If public charging feels clumsy, the entire ownership experience suffers. That is why Volvo’s push toward Plug & Charge and better route-based charging integration matters more than it might first appear. It is not just a feature add. It is Volvo trying to remove one of the most stubborn barriers between buyers and a fully comfortable EV lifestyle.

Volvo is using software and charging integration to make EV ownership feel more polished, not just more electrified.
Volvo Is Selling Simplicity As Much As Range
That is what makes this a smart story for the current EV market. Right now, the brands that stand out are not only the ones chasing bigger battery packs or quicker acceleration. They are also the ones solving the annoying everyday problems that still make some buyers hesitate before switching to an EV.
Volvo clearly understands that. Rather than turning this into a headline about raw charging speed alone, the company is framing it around convenience, simplicity and trust. It wants owners to feel that the vehicle can guide them to the right charger, connect without drama and make long-distance travel less stressful than it often is in the broader charging ecosystem.
For a brand built around calm design, safety and usability, that is the right message. Volvo does not need to shout louder than everyone else in the EV space. It needs to make the experience smoother — and this is exactly the kind of update that helps do that.

By making charging more automatic and less frustrating, Volvo is trying to solve one of the most important real-world issues in EV ownership.
The Bigger Goal Is To Make Electric Volvo Ownership Feel Effortless
That is the real takeaway here. Volvo is not reinventing EV charging overnight, but it is targeting one of the areas where the gap between promise and reality is still too wide. If the company can make charging feel as intuitive as the rest of the vehicle experience, that becomes a meaningful advantage — especially for luxury buyers who expect everything around the car to feel polished, not improvised.
And that is why this matters now. In a crowded EV market, a smoother charging experience can be just as important as an extra 20 miles of range. Volvo seems to know that the next stage of the EV fight is not only about building electric SUVs. It is about making people actually enjoy owning them.
INTELLIGENT MOBILITY
Honda Wants TrailSport To Be More Than A Badge With A New Off-Road Adventure App

Honda has launched a new app in the United States designed specifically for TrailSport owners, and the move says a lot about where the brand wants to take its off-road SUV identity. Rather than treating TrailSport as just another trim level with tougher styling cues, Honda is now building a digital ownership experience around it, giving drivers new tools to explore trails, discover off-road destinations and get more out of their SUVs beyond the pavement.
That makes this more than a simple app launch. It is a clear sign that Honda wants TrailSport to evolve into something closer to a full outdoor-lifestyle sub-brand, one built not only around vehicles like the Passport, Pilot and Ridgeline, but also around the way owners actually use them in the real world.

Honda is expanding the TrailSport idea beyond the vehicle itself with a new app designed for off-road exploration in the U.S.
Honda Is Trying To Turn TrailSport Into A Real Off-Road Ecosystem
The TrailSport badge has grown into one of Honda’s most visible SUV sub-brands in North America, but the company clearly understands that styling, tires and rugged trim details are no longer enough on their own.
With this new app, Honda is adding another layer to the TrailSport proposition: a digital tool aimed at helping owners find trails, plan off-road trips and explore the kinds of outdoor routes that fit the image Honda has been building around these SUVs. That changes the conversation around TrailSport because it shifts the focus from the product alone to the broader ownership experience.
In other words, Honda is no longer just selling an SUV with off-road branding. It is trying to make the TrailSport name feel like an invitation to actually go out and use it.
The Real Story Is What Honda Thinks Buyers Want From Adventure SUVs
That matters because the American SUV market has changed.
Buyers no longer choose rugged-looking crossovers and family SUVs only because they want extra ground clearance or all-terrain styling. In many cases, they are also buying into a lifestyle image tied to road trips, camping, trail access and outdoor recreation. Brands have noticed that shift, and increasingly they are trying to sell not just the vehicle, but the experience that comes with it.
Honda’s new TrailSport app fits directly into that trend. Instead of simply advertising that a Passport TrailSport or Pilot TrailSport can handle dirt roads and trailheads, the company is creating a digital bridge between the SUV and the places owners might actually want to explore.

The new app is designed to help TrailSport owners discover trails and turn Honda’s off-road branding into a more practical ownership experience.
Honda Is Strengthening TrailSport At A Key Moment
The timing is important.
TrailSport has become one of Honda’s clearest attempts to carve out a stronger identity in the adventure-focused SUV space, particularly in a market where buyers are constantly being pulled toward brands with more established off-road reputations. That means Honda needs TrailSport to feel authentic and useful, not just decorative.
Launching an app built around off-road discovery helps reinforce that effort. It gives Honda another way to tell buyers that TrailSport is not just about how the SUV looks in the driveway, but about how it fits into weekend travel, outdoor use and light off-road exploration.
This Is Also About Keeping Owners Inside The Honda World
There is another layer to this strategy.
By building a branded off-road app for TrailSport owners, Honda is creating a new touchpoint that keeps customers connected to the brand even when they are not shopping for a new vehicle. That matters in an era when automakers increasingly want to extend the ownership relationship through software, services and lifestyle-oriented digital tools.
For Honda, the value is obvious: the more useful and integrated TrailSport becomes as an ownership ecosystem, the easier it is to strengthen loyalty and make the sub-brand feel distinct from a regular Passport, Pilot or Ridgeline.

Honda is using TrailSport to connect its SUVs with the broader adventure-lifestyle market in the U.S.
TrailSport Is Starting To Feel Like A Bigger Honda Strategy
The app itself may be the headline today, but the more interesting story is what it represents.
Honda is treating TrailSport less like a trim package and more like a growing pillar of its SUV strategy in America. The vehicles remain the foundation, but the brand now seems intent on surrounding them with a more complete ownership experience built around discovery, adventure and off-road credibility.
That approach makes sense in a market where buyers increasingly expect their SUVs to be part of a broader lifestyle story. If Honda can keep building TrailSport in that direction, the badge could become much more valuable than a simple rugged appearance package.

Honda’s new app suggests TrailSport is becoming more than a trim line — it is turning into a broader off-road experience strategy for the U.S. market.
Today’s app launch may look modest at first glance, but it reveals a bigger ambition. Honda wants TrailSport to stand for more than black cladding, tougher tires and a few extra off-road features. It wants it to become a more complete adventure identity — one that starts with the SUV, but does not end there.
INTELLIGENT MOBILITY
Toyota’s Latest EV Recall Shows How Critical Software Has Become In Modern Electric Cars

Toyota has issued a recall for certain 2026 Toyota bZ and Lexus RZ electric vehicles in North America, underscoring how software has become just as important as hardware in the modern EV era. While battery capacity and charging speed often dominate the conversation around electric cars, this latest recall highlights a less visible but equally important reality: the software that manages power delivery can have a direct impact on vehicle safety and drivability.
The issue affects the electronic control logic responsible for managing the battery that powers the drive system, reinforcing how the transition to electric mobility is increasingly tied to the reliability of software-driven systems.

Toyota’s latest EV recall highlights the growing importance of software reliability in modern electric vehicles.
EV Reliability Is No Longer Just About Motors And Batteries
For decades, automotive reliability was often judged by engines, transmissions and mechanical durability.
Electric vehicles are changing that equation. Today, a growing portion of a vehicle’s behavior is dictated by software, control units and electronic power management systems. These digital layers determine how energy flows from the battery to the drive system, how charging is managed and how safety systems respond when something goes wrong.
That means an EV’s reliability increasingly depends on code and calibration just as much as on motors, battery cells and hardware components.
Why This Recall Matters
The recall involving the 2026 Toyota bZ and Lexus RZ centers on the control logic that manages the battery supplying power to the propulsion system. Under certain conditions, a software-related fault could trigger a loss of drive power, a scenario that immediately elevates the seriousness of the issue.
From an engineering standpoint, this is exactly why software has become one of the most critical parts of modern EV development. Electric vehicles rely on constant communication between battery management systems, power electronics and control modules, and when that chain is disrupted, the impact can go far beyond convenience.

The recall affects Toyota and Lexus electric vehicles built around increasingly software-dependent EV architectures.
The Rise Of The Software-Defined Vehicle
This recall also fits into a much larger industry trend.
Automakers are increasingly building software-defined vehicles, where functionality, efficiency, range behavior and even some performance characteristics can be adjusted or improved through software updates. That creates major opportunities for innovation, but it also means that software errors can influence critical systems that were once governed almost entirely by hardware.
As a result, recalls in the EV era are often becoming less about broken physical parts and more about the logic controlling the vehicle behind the scenes.
A Broader Lesson For The EV Industry
Toyota’s recall is not simply about one model or one brand. It reflects a challenge facing the entire automotive sector as vehicles become more connected, electrified and electronically complex.
Battery management, inverter control, thermal systems and energy distribution are all now deeply dependent on sophisticated software. In practice, that means the future of EV reliability will be shaped not only by chemistry and hardware engineering, but also by the ability of automakers to validate, monitor and update their software ecosystems with the same rigor traditionally applied to mechanical components.

Powertrain software is now one of the most important components in the EV ownership experience.
The Toyota bZ and Lexus RZ recall serves as another reminder that electric mobility is entering a phase where software quality is becoming central to both customer confidence and vehicle safety. As EV adoption grows, consumers are likely to pay increasing attention not only to range and charging speed, but also to how well automakers manage the digital systems that keep those vehicles moving.

Modern EVs depend on software not only for convenience and efficiency, but also for the safe delivery of power.
For Toyota and Lexus, the recall is a corrective step. For the wider industry, it is a clear illustration of how electric vehicles are reshaping the very definition of automotive reliability. In the software-defined era, the quality of the code behind the battery may be just as important as the battery itself.
-
 INTELLIGENT MOBILITY8 months ago
INTELLIGENT MOBILITY8 months agoCustomers Demand a Manual Honda Prelude: Will It Ever Happen?
-
 INTELLIGENT MOBILITY8 months ago
INTELLIGENT MOBILITY8 months agoRolls-Royce Phantom Centenary Edition: A Century of Luxury Taken to the Next Level
-
 INTELLIGENT MOBILITY8 months ago
INTELLIGENT MOBILITY8 months agoHonda S2000: The Iconic Roadster Could Return, But Challenges Remain
-
 NOW TRENDING12 years ago
NOW TRENDING12 years agoToyota Partners goes Glam with Fashion
-
 INTELLIGENT MOBILITY8 months ago
INTELLIGENT MOBILITY8 months agoHonda NSX Reborn: Pininfarina and JAS Bring Back the V6 Legend with a Modern Twist
-
 INTELLIGENT MOBILITY7 months ago
INTELLIGENT MOBILITY7 months ago10,000 RPM Madness: The Honda S2000 Resurrected with 580 HP and a Supercharged Heart
-
 INTELLIGENT MOBILITY8 months ago
INTELLIGENT MOBILITY8 months agoFIFA World Cup 2026: The Importance of Electric Vehicles
-
 INTELLIGENT MOBILITY8 months ago
INTELLIGENT MOBILITY8 months agoBYD Atto 8: The New 7-Seater PHEV SUV Arrives in Mexico
You must be logged in to post a comment Login