728 × 90 Banner
“In the last few months, we have rapidly accelerated our pace in advancing Toyota’s automated driving capabilities with a vision of saving lives, expanding access to mobility, and making driving more fun and convenient,†said Dr. Gill Pratt, CEO of TRI. “Our research teams have also been evolving machine intelligence that can support further development of robots for in-home support of people.â€

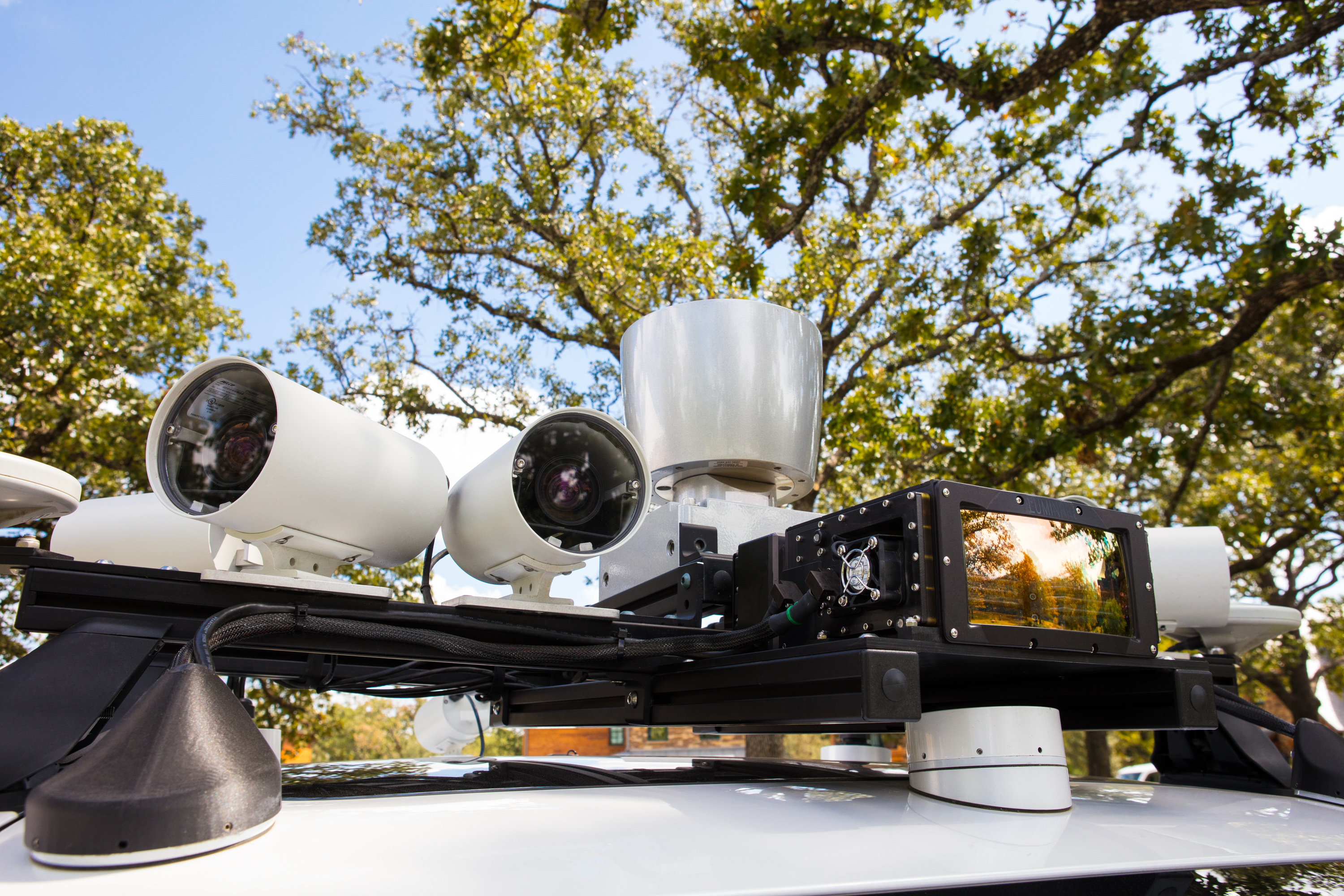
Since unveiling its Platform 2.0 research vehicle in March 2017, TRI has quickly updated its automated driving technology. The next iteration, dubbed Platform 2.1, is being shown for the first time on a closed-course. In parallel with the creation of this innovative test platform, TRI has made strong advances in deep learning computer perception models that allow the automated vehicle system to more accurately understand the vehicle surroundings, detecting objects and roadways, and better predict a safe driving route. These new architectures are faster, more efficient and more highly accurate. In addition to object detection, the models’ prediction capabilities can also provide data about road elements, such as road signs and lane markings, to support the development of maps, which are a key component of automated driving functionality.
Platform 2.1 also expands TRI’s portfolio of suppliers, incorporating a new high-fidelity LIDAR system provided by Luminar. This new LIDAR provides a longer sensing range, a much denser point cloud to better detect positions of three-dimensional objects, and a field of view that is the first to be dynamically configurable, which means that measurement points can be concentrated where sensing is needed most. The new LIDAR is married to the existing sensing system for 360-degree coverage. TRI expects to source additional suppliers as disruptive technology becomes available in the future.
On Platform 2.1, TRI created a second vehicle control cockpit on the front passenger side with a fully operational drive-by-wire steering wheel and pedals for acceleration and braking. This setup allows the research team to probe effective methods of transferring vehicle control between the human driver and the autonomous system in a range of challenging scenarios. It also helps with development of machine learning algorithms that can learn from expert human drivers and provide coaching to novice drivers.

TRI has also designed a unified approach to showing the various states of autonomy in the vehicle, using a consistent UI across screens, colored lights and a tonal language that is tied into Guardian and Chauffeur. The institute is also experimenting with increasing a driver’s situational awareness by showing a point cloud representation of everything the car “sees†on the multi-media screen in the center stack.
With its broad-based advances in hardware and software, Platform 2.1 is a research tool for concurrent testing of TRI’s dual approaches to vehicle autonomy – Guardian and Chauffeur – using a single technology stack. Under Guardian, the human driver maintains vehicle control and the automated driving system operates in parallel, monitoring for potential crash situations and intervening to protect vehicle occupants when needed. Chauffeur is Toyota’s version of SAE Level 4/5 autonomy where all vehicle occupants are passengers. Both approaches use the same technology stack of sensors and cameras. This week marks the first time the Guardian and Chauffeur systems have been demonstrated on the same platform, which includes multiple test scenarios to demonstrate TRI’s advances in both applications.
These include the ability of the Guardian system to detect distracted or drowsy driving in certain situations, and to take action if the driver does not react to turns in the road. In such a situation, the system first warns and then will intervene with braking and steering to safely follow the road’s curvature. Chauffeur test scenarios demonstrate the vehicle’s ability to drive itself on a closed course, navigate around road obstacles, and make a safe lane change around an impediment in its path with another vehicle travelling at the same speed in the lane next to it.
In addition to real-world testing, TRI is using simulation to accurately and safely test engineering assumptions, and investors can experience automated driving test scenarios in a virtual simulator.
TRI is also making advancements in robotics and artificial intelligence.
As part of its research into human support robots that can assist with tasks in the home, such as item retrieval, TRI has pioneered new tools to give future robots enhanced, human-like dexterity in order to grasp and manipulate objects so that they are not dropped or damaged. TRI is also applying computer vision and artificial intelligence to robot development, allowing robots to detect the physical presence of humans and objects, note their locations and retrieve objects for humans when prompted. The robots can detect when objects have been relocated, updating the item’s location in the robot’s database, and even detect faces of known people and differentiate individuals.
TRI’s progress in robotics have been made possible by its ability to increase the value and accuracy of simulation to augment physical testing. Since it is impossible to physically test the wide variety of situations robots may encounter in the real world, the institute uses simulated environments, constantly adapting them with data collected in real-world testing for greater precision.
Additionally, TRI is pursuing new concepts for applying artificial intelligence inside a vehicle cabin to keep occupants comfortable, safe and satisfied. The institute has created a simulator showing an in-car AI agent that can detect a driver’s skeletal pose, head and gaze position and emotion to anticipate needs or potential driving impairments. For example, when the system detects the driver taking a drink and facial expressions which might indicate discomfort, the agent hypothesizes that the driver might be feeling warm and can adjust the air conditioning or roll down the windows. If the agent detects drowsiness, it might provide a verbal prompt in the cabin suggesting that the driver pull over for coffee or navigate the car to a coffee shop.

In addition to its technology demonstrations, Toyota also released a comprehensive overview of its work on automated driving, including the philosophy that guides its approach to the technology, its ongoing research programs, and its near-term product plans. The white paper reflects Toyota’s understanding of the potential for automated driving to dramatically expand mobility options for people around the world, helping to create a society where mobility is safe, convenient, enjoyable, and available to everyone. It summarizes the dual concepts of Guardian and Chauffeur that guide Toyota’s research and the Mobility Teammate Concept that guides its product development.
“Vehicles with automated driving technology will bring many benefits to society, but one of the top priorities at Toyota is to help make the traffic environment safer,†said Kiyotaka Ise, Chief Safety Technology Officer and Senior Managing Officer of Toyota Motor Corporation. “By having our vehicle technologies seamlessly anticipate and interact with human beings and the traffic environment, we will get closer to realizing a future without traffic injuries or fatalities.â€
The white paper is available atwww.automatedtoyota.com.
Media Contact:John Hanson







New spy images reveal a shift in aesthetic direction for the upcoming BMW M5 to move away from the radical Neue Klasse design.
BMW decided to reverse the controversial front design shown by previous Series 5 test mules. Now, the new M5 exhibits two clearly defined nostrils in its main grille. These pieces are less bulky than those of the current model according to what the camouflage wraps allow us to see. The bumper includes an additional elongated opening located just above the license plate. Furthermore, engineers have completely reshaped the vehicle’s lower air intakes.
The rear lights seem ready for final production despite the adhesive tape. They feature a single red line that widens as it reaches the side corners. This lighting signature marks a notable difference compared to the current double-line design. However, the headlights still retain provisional components without LED accent lights. Consequently, the final appearance of the sporty face remains under subtle secrecy.
Technological Revolution and Competitive Weight
The M5 interior will adopt the advanced Panoramic iDrive system originally debuted in the iX3. This technology uses the lower section of the windshield as a series of configurable displays. This setup allows for the installation of a central screen smaller than modern industry standards. Thanks to this, the driver views critical information without looking away from the asphalt. It is a qualitative leap toward the total digitalization of the cockpit.
Regarding its performance, the total weight will reach nearly 5,400 pounds of mass. Although it seems like a high figure, the car remains in line with its direct rivals. For example, an Audi RS6 delivers less power while weighing about 5,000 pounds. The Mercedes-AMG S63 exceeds the BMW with a total weight of 5,800 pounds. Therefore, the M5 remains a balanced option within the segment.
BMW’s M division could increase power to approximately 740 horsepower. However, experts do not expect drastic mechanical changes due to the chassis tonnage. Such a heavy vehicle would unlikely receive a “Competition” type treatment without a prior diet. We will see the final version of this high-performance sedan during the year 2026. Its official commercialization will likely start before the end of the 2027 season.

Ford’s iconic compact SUV says goodbye after 25 years to make way for the new electric era. The departure of the Escape marks the end of an era of practical and affordable vehicles within the Blue Oval’s lineup.
Ford officially concludes the production of the Ford Escape at the end of this year, 2025. Currently, this move responds to CEO Jim Farley’s strategy to eliminate “boring” products from the catalog. The company aims to focus its efforts on more profitable and exciting vehicles under the Mustang, Bronco, and Raptor brands. Consequently, the Louisville, Kentucky plant halted the assembly line for this SUV alongside its relative, the Lincoln Corsair.
The Escape held a fundamental place as Ford’s second best-selling SUV for much of its history. In fact, through the third quarter of 2025, the model outsold the entire Bronco family and the Mustang. However, the brand will retool the factory to produce a new mid-size electric pick-up in 2027. Plant employees bid farewell to the last unit built with signatures and messages of affection on the bodywork.

The End of Affordable Practicality
The disappearance of this model leaves a significant gap in the brand’s segment of functional vehicles. The Escape offered a generous cargo space of 37.5 cubic feet behind the second row of seats. Likewise, the vehicle stood out for its efficiency through 40 mpg hybrid options and a competitive PHEV variant. With a starting price of $30,350, it represented the second most affordable option in the entire current catalog.
Concern Within the Dealer Network
Ford dealers have expressed their concern over losing a model with such consistent sales. Some sales managers consider it a strategic mistake to eliminate a vehicle that attracts a very specific buyer. According to experts, neither the Bronco Sport nor the Maverick pick-up fully fills the Escape buyer’s profile. Therefore, interested buyers can still find more than 17,800 new units available at dealerships nationwide.

Lucid Motors has issued the first-ever recall for its luxury electric SUV, the 2026 Lucid Gravity. While the number of affected units is small, the issue stands out for its unusual nature: a labeling error on the front seat backrest covers.
The problem originated in the supply chain, specifically with the supplier Piston Interiors, which manufactures the seatback covers for Lucid. Due to human error, “left” and “right” labels were swapped on a batch produced between September 8 and September 22, 2025. Consequently, some driver-side covers were installed on the passenger side and vice versa.
While the error is difficult to detect aesthetically, the safety consequences are critical. Modern seat covers are engineered with specific stitching that allows the side airbag to deploy with the correct force and direction. If the cover is on the wrong side, it could block or divert the airbag during a side impact, significantly increasing the risk of injury to occupants.
Detection and Manufacturer’s Solution
The fault was discovered in October by Hyundai Transys, the company that assembles the complete seats for Lucid, after identifying an incorrect label during assembly. Lucid reacted immediately by issuing a stop-sale order on October 31 and inspecting its inventory. Of the 113 potentially affected vehicles initially identified, only 66 had already reached customers.

To resolve the issue, Lucid will contact owners to bring their vehicles to a service center. Technicians will inspect both front seats and replace the backrest covers at no cost to the customer. The manufacturer has also confirmed it will reimburse any related out-of-pocket expenses owners may have incurred before receiving the official notification.
Preventive Measures and Future Outlook
To prevent this error from recurring, the supplier has implemented a camera-based quality inspection system that verifies labels using machine vision before they leave the production line. Lucid expects to mail official notification letters to affected customers in early February 2026. Despite this logistical setback, Lucid remains focused on the quality of its flagship SUV, which continues to be one of the longest-range electric SUVs on the market.
-
 INTELLIGENT MOBILITY7 months ago
INTELLIGENT MOBILITY7 months agoCustomers Demand a Manual Honda Prelude: Will It Ever Happen?
-
 TEST DRIVES3 weeks ago
TEST DRIVES3 weeks ago2025 Ford Maverick Lobo
-
 INTELLIGENT MOBILITY7 months ago
INTELLIGENT MOBILITY7 months ago10,000 RPM Madness: The Honda S2000 Resurrected with 580 HP and a Supercharged Heart
-
 INTELLIGENT MOBILITY7 months ago
INTELLIGENT MOBILITY7 months agoFIFA World Cup 2026: The Importance of Electric Vehicles
-
 INTELLIGENT MOBILITY7 months ago
INTELLIGENT MOBILITY7 months agoBYD Atto 8: The New 7-Seater PHEV SUV Arrives in Mexico
-
 INTELLIGENT MOBILITY7 months ago
INTELLIGENT MOBILITY7 months agoNew Dodge Charger Hustle Stuff Drag Pack 2025: The Wild Return of the Hemi V8
-
 INTELLIGENT MOBILITY7 months ago
INTELLIGENT MOBILITY7 months agoKia Sportage 2026: Safety Excellence Crowned with IIHS TOP SAFETY PICK+ Award
-
 INTELLIGENT MOBILITY7 months ago
INTELLIGENT MOBILITY7 months agoKia America Achieves Record-Breaking October 2025 Sales
You must be logged in to post a comment Login